![]()
![]()
![]()
![]()
Das Projekt zielt darauf ab, unser Verständnis dafür zu fördern, wie räumliche und semantische Unsicherheiten bei der Darstellung von Landmarken in Karten die Orientierung und Navigation beeinflussen. Der Fokus liegt hierbei auf der Untersuchung von Karten, die auf freiwillig erhobenen Daten, sogenannter Volunteered Geographic Information (VGI), basieren.
Räumliche Unsicherheit wird durch mögliche räumliche Ungenauigkeiten von Kartenelementen verursacht. Insbesondere VGI-basierte Karten sind anfällig für Schwankungen in der Datenqualität (Girres & Touya, 2010; van Exel et al., 2010). Gründe für räumliche Ungenauigkeiten im Zusammenhang mit VGI-basierten Karten sind die unterschiedliche Expertise und Motivation der Kartendatenlieferanten sowie der Einsatz unterschiedlicher Geräte zur Georeferenzierung und Umweltfaktoren wie die Verfügbarkeit von GPS-Signalen mit ausreichender Signalstärke (Sieber & Haklay, 2015; Zandbergen & Barbeau, 2011). Folglich können Landmarkendarstellungen in Karten mit unterschiedlichem Grad an Ungenauigkeit am falschen Ort auf der Karte lokalisiert sein. In diesem Zusammenhang ist die räumliche Unsicherheit die Unsicherheit darüber, ob eine bestimmte Landmarke innerhalb einer Karte korrekt georeferenziert ist. Semantische Unsicherheit hingegen entsteht durch potenziell ungenaue Zuordnungen semantischer Merkmale, z.B. durch die Darstellung einer Landmarke mit einem ungeeigneten Piktogram.
In mehreren Studien untersuchen wir, wie sich die Landmarkenunsicherheit auf den Kartenabgleich und damit auf die Orientierungs- und Fußgängernavigationsleistung von Kartennnutzern auswirkt und wie kognitive Prinzipien und kartografisches Design genutzt werden können, um erwartete Verzerrungen im Zusammenhang mit den Merkmalen von VGI-Daten zu überwinden. Basierend auf einer Reihe experimenteller Studien werden empirische Daten gesammelt und zur Quantifizierung der Verzerrung verwendet, die auf der Repräsentationsebene aufgrund der Landmarkenunsicherheit entsteht. Darüber hinaus untersuchen diese Studien die Wirksamkeit wegweisender Landmarkendesignlösungen auf der Grundlage von MacEachren (1992) zur Kommunikation räumlicher Unsicherheit.
Es wurde angenommen, dass im Kontext der Kartennutzung für Wegfindungs- und Navigationsaufgaben die visuelle Darstellung einer Landmarke dann am effizientesten ist, wenn neben ihrer Lage auch ihre räumliche Unsicherheit erfolgreich vermittelt wird. Wenn Kartennutzer davon ausgehen, dass Unsicherheit ein inhärentes Merkmal einer Karte ist, können sie diese Implikationen berücksichtigen, wenn unvollständige oder ungenaue Karten verwendet werden. Daher untersucht das Projekt, ob Karten so gestaltet werden können, dass sie implizit eine Unsicherheit suggerieren. Dadurch würde die in den VGI-Daten vorhandene Unsicherheit den Kartenlesern mitgeteilt und somit nutzbar gemacht. Wir gehen davon aus, dass Kartennutzer, die eine solche Strategie für Orientierungsaufgaben anwenden, eine höhere Flexibilität im Umgang mit thematischen Unsicherheiten und eine verbesserte Navigationsleistung aufweisen. Die Erkenntnisse des Projekts können dazu beitragen, unser Verständnis darüber zu verbessern, wie Merkmale von VGI-Daten die Benutzerinteraktion beeinflussen. Letztendlich wird dies dazu beitragen, das VGI-basierte Kartendesign in zukünftigen Navigationsanwendungen zu verbessern.
Rahmendaten
Zeitraum: 2021 - 2024
Website: https://www.vgiscience.org/
Antragsteller:in:. Die Darstellung der Landmarke in der rechten Karte ist semantisch ungenau, da die durch das Piktogramm vermittelte semantische Information (Tankstelle) nicht zur dargestellten Landmarke (Recyclingcontainer) passt.")
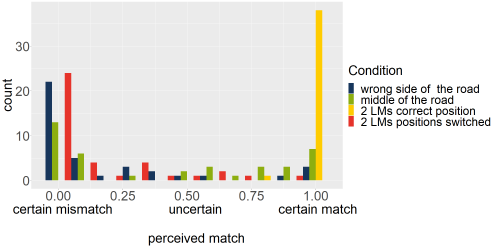
Eine erste Studie diente der Quantifizierung, wie sich räumliche und semantische Ungenauigkeiten von Landmarkendarstellungen in Karten auf den erfolgreichen Abgleich zwischen Karten und den dargestellten 3D-Umgebungen auswirken. Zu diesem Zweck haben wir eine virtuelle 3D-Umgebung und eine entsprechende Kartendarstellung erstellt (siehe Abb. 2). Die 3D-Umgebung bestand aus einer langen Straße und zwei T-Kreuzungen, einheitlich gestalteten Gebäuden entlang der Straße und einem Landmarkengebäude. Auf die Position der Landmarkenkartendarstellung entlang der langen Straße wurden zufällige räumliche Ungenauigkeiten angewendet. Darüber hinaus wurden in separaten Versuchen Landkartenpiktogramme mitten auf der Straße oder auf der falschen Straßenseite platziert. In zwei weiteren Versuchen enthielt die 3D-Umgebung zwei Landmarkengebäude mit unterschiedlichen Piktogrammdarstellungen. In einem Versuch wurden die Piktogramme an den richtigen Stellen auf der Karte platziert. Im anderen Versuch wurden die Positionen der beiden Piktogramme in der Karte vertauscht. Nach jedem Versuch wurden die Versuchsteilnehmer gebeten, die wahrgenommene Übereinstimmung zwischen der 3D-Umgebung und der Karte auf einer kontinuierlichen Skala einzuschätzen.

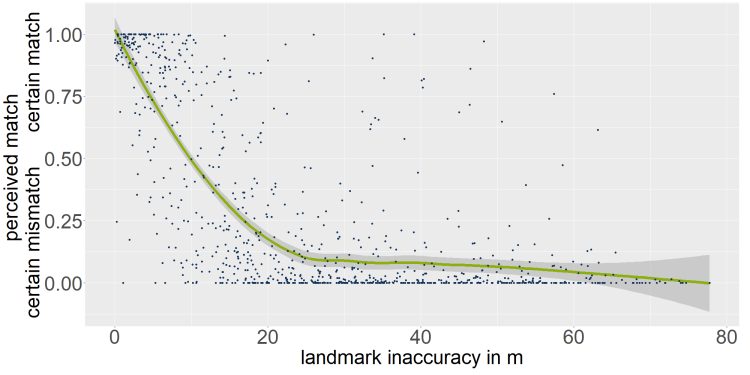
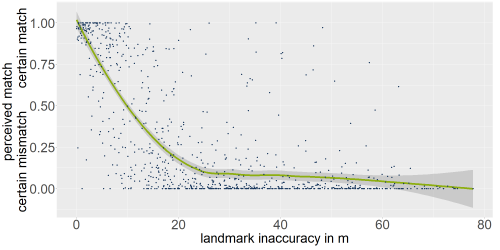
Die Ergebnisse zeigen, dass die Teilnehmer mit zunehmender räumlicher Ungenauigkeit der Landmarkendarstellung weniger wahrscheinlich eine Übereinstimmung zwischen der 3D-Umgebung und der Karte wahrnahmen (siehe Abb. 3).

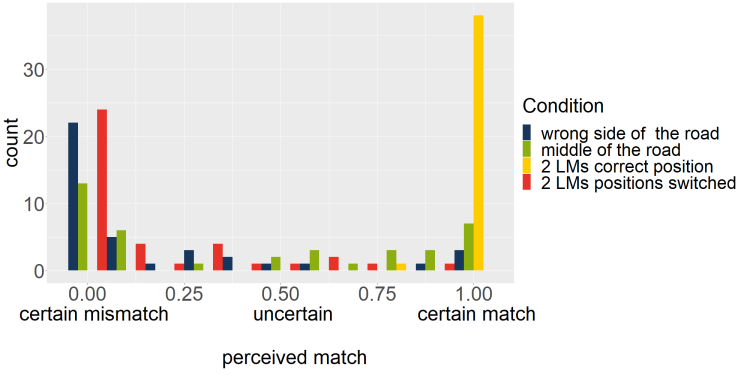
Darüber hinaus führten, ähnlich wie räumliche Ungenauigkeiten, ungenaue semantische Informationen der Landmarkendarstellungen in der Karte zu der Wahrnehmung einer Diskrepanz zwischen der 3D-Umgebung und ihren Kartendarstellungen (siehe Abb. 4). Dies gilt sowohl für die semantischen Informationen, die durch das Design des Orientierungspunkt-Piktogramms vermittelt werden (wie durch das Vertauschen der Positionen zweier verschiedener Orientierungspunkt-Piktogramme gezeigt wird), als auch für semantische räumliche Kategorien, wie die Darstellung einer Landmarke auf der falschen Straßenseite.

Die Ergebnisse unserer ersten Studie zeigen, dass sowohl räumliche als auch semantische Ungenauigkeiten von Landmarkenungenauigkeiten in Karten die Fähigkeit beeinflussen, eine Karte mit der dargestellten räumlichen Umgebung abzugleichen. Dies verdeutlicht, wie wichtig es ist, die räumliche und semantische Unsicherheit der Darstellung von Landmarken in Karten zu minimieren, da ein erfolgloser Kartenabgleich die räumliche Orientierung, Wegfindung und Navigation beeinträchtigen könnte. Erstens können Schwierigkeiten beim Kartenabgleich eine erfolgreiche räumliche Orientierung und Navigation verlangsamen oder sogar verhindern. Zweitens: Wenn Menschen Karten aufgrund räumlicher und semantischer Ungenauigkeiten und daraus resultierender Schwierigkeiten beim Kartenabgleich als unzuverlässig empfinden, sind sie möglicherweise, nicht bereit die Karten weiter zu verwenden, selbst wenn nur einige der Kartenelemente räumlich oder semantisch ungenau sind. In den nachfolgenden Studien gingen wir auf diese Probleme ein, indem wir untersuchten, wie ein erfolgreicher Kartenabgleich trotz räumlicher Landmarkenungenauigkeiten erreicht werden kann.
In zwei aufeinanderfolgenden Studien haben wir untersucht, ob Methoden zur Visualisierung räumlicher Unsicherheit, wie sie von MacEachren (1992) vorgeschlagen wurden, verwendet werden können, um den erfolgreichen Kartenabgleich im Zusammenhang mit räumlich ungenauen Landmarkendarstellungen in Karten zu verbessern. Der Zweck solcher Unsicherheitsvisualisierungen besteht darin, den Kartennutzer über mögliche räumliche Ungenauigkeiten von Kartenelementen zu informieren und so die Grundlage für eine fundiertere Entscheidungsfindung zu schaffen (vgl. Padilla et al., 2014; Pang et al., 1997). Anstatt eine Nichtübereinstimmung zwischen einer (teilweise) räumlich ungenauen Karte und dem dargestellten Raum wahrzunehmen, könnten Kartenbenutzer für den Kartenabgleich auf andere Kartenelemente zurückgreifen, wenn ihnen bewusst ist, dass einige Kartenelemente als Orientierungspunktpiktogramme räumlich mehr oder weniger ungenau sein können.
In der zweiten Studie des Forschungsprojekts haben wir das Experiment aus der ersten Studie wiederholt und drei Arten der Unsicherheitsvisualisierung hinzugefügt. Diese Visualisierungen umfassten Größenvariationen der Landmarkenpiktogramme, Piktogrammtransparenz und einen kreisförmigen Unsicherheitsbereich um die Landmarkenpiktogramme.
Die dritte Studie befasst sich mit der Tatsache, dass reale Umgebungen im Gegensatz zu der vollständig kontrollierten minimalistischen 3D-Umgebung, die in den ersten beiden Studien verwendet wurde, in der Regel sehr komplex sind, was die Straßengestaltung und andere räumliche Elemente betrifft, die als räumliche Bezugspunkte für den Kartenabgleich verwendet werden können. Daher kann davon ausgegangen werden, dass die Rolle einzelner Landmarken und ihrer Kartendarstellungen für den Kartenabgleich weniger entscheidend ist und räumliche Ungenauigkeiten einer einzelnen Landmarkendarstellung weniger Auswirkungen auf den erfolgreichen Kartenabgleich haben. Um dies zu untersuchen, haben wir die vorherige Studie mithilfe von 360°-Bildaufnahmen realer Straßenszenen repliziert. Die zugehörigen Karten wurden von OpenStreetMap bezogen und zufällige räumliche Ungenauigkeiten auf die Kartendarstellungen einer in den 360°-Bildern sichtbaren Landmarke angewendet. Zusätzlich zu einer Kontrollbedingung wurden die gleichen Unsicherheitsvisualisierungen wie in der vorherigen Studie (Größenvariationen der Landmarkenpiktogramme, Piktogrammtransparenz und kreisförmige Unsicherheitsbereiche) auf die Darstellungen der Landmarkenpiktogramme angewendet.
Die Ergebnisse der beiden Studien werden derzeit in einer Peer-Review-Zeitschrift veröffentlicht und nach Abschluss des Veröffentlichungsprozesses hier dargestellt.
Keil, J., O'Meara, D., Korte, A., Edler, D., Dickmann, F., & Kuchinke, L. (2024). How to visualize the spatial uncertainty of landmark representations in maps? Journal of Environmental Psychology, 99, 102441. https://doi.org/10.1016/j.jenvp.2024.102441
Keil, J., Edler, D., Dickmann, F., & Kuchinke, L. (2022). Uncertainties in Spatial Orientation: Critical Limits for Landmark Inaccuracies in Maps in the Context of Map Matching. KN - Journal of Cartography and Geographic Information. https://doi.org/10.1007/s42489-022-00105-7
Keil, J., Edler, D., Kuchinke, L., & Dickmann, F. (2022). Visualization of Spatial Uncertainty Improves Map Matching. Abstracts of the ICA, 5, 55. https://doi.org/10.5194/ica-abs-5-55-2022
Girres, J.‑F., & Touya, G. (2010). Quality Assessment of the French OpenStreetMap Dataset. Transactions in GIS, 14(4), 435–459. https://doi.org/10.1111/j.1467-9671.2010.01203.x
MacEachren, A. M. (1992). Visualizing Uncertain Information. Cartographic Perspectives, (13), 10–19. https://doi.org/10.14714/CP13.1000
Padilla, L., Kay, M., & Hullman, J. (2014). Uncertainty Visualization. In N. Balakrishnan, T. Colton, B. Everitt, W. Piegorsch, F. Ruggeri, & J. L. Teugels (Eds.), Wiley StatsRef: Statistics Reference Online (Vol. 26, pp. 1–18). Wiley. https://doi.org/10.1002/9781118445112.stat08296
Pang, A. T., Wittenbrink, C. M., & Lodha, S. K. (1997). Approaches to Uncertainty Visualization. The Visual Computer, 13(8), 370–390.
Sieber, R. E., & Haklay, M. (2015). The epistemology(s) of volunteered geographic information: a critique. Geo: Geography and Environment, 2(2), 122–136. https://doi.org/10.1002/geo2.10
van Exel, M., Dias, E., & Fruijtier, S. (2010). The impact of crowdsourcing on spatial data qualityindicators. GIScience 2010. http://giscience2010.org/index6b70.html
Zandbergen, P. A., & Barbeau, S. J. (2011). Positional Accuracy of Assisted GPS Data from High-Sensitivity GPS-enabled Mobile Phones. Journal of Navigation, 64(3), 381–399. https://doi.org/10.1017/S0373463311000051
Copyright © Geographisches Institut 2026
Letzte Änderung: 28. Jan. 2026
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}